株式会社メルティンMMI(以下、MELTIN)は、生体信号処理技術とロボット技術を利用した医療機器やアバターロボットなどの研究開発・事業化を通して、義体やBMI (Brain Machine Interface:脳と機械をつなぐインタフェース)に代表されるサイボーグ技術の実現を目指すベンチャー企業です。サイボーグ技術によって物理的な制約を取り払い、年齢や身体の状態によらず誰もが自分らしく活躍ができる世界を創ることをビジョンに掲げています。
「制約にとらわれず誰もが自分らしく、可能性を最大化できる未来を実現させたい」という思いが共通していたことを契機に、当社は2018年10月にMELTINへの出資および共同研究開発契約を締結し、MELTINのコア技術を利用して医療に役立つ機器の共同研究開発に取り組んできました。MELTINが持つロボット技術と生体信号処理技術に、当社が培ってきた医療領域での知見・知識・経験の強みを掛け合わせ、医学と工学の「医工連携」を実現させることで、新しい事業開発に取り組んでいます。
MELTIN独自の生体信号解析技術
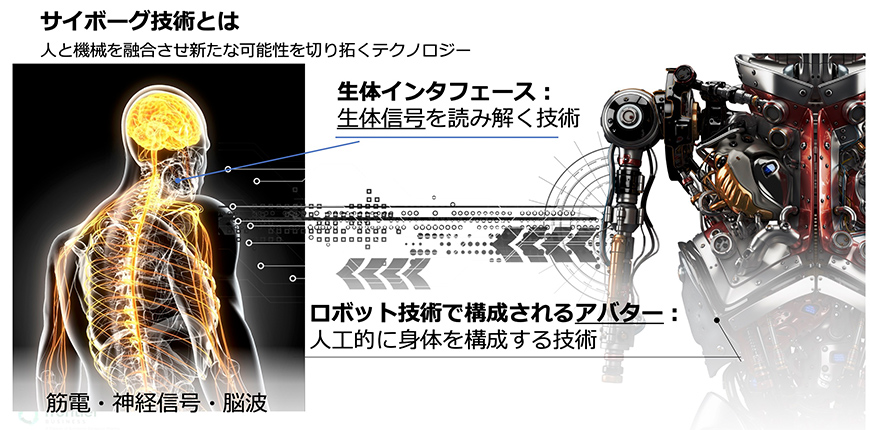
生体信号とは、脳波や筋電などのわたしたちの身体の中の神経を流れる電気信号のことを指します。たとえば、わたしたちが手を動かす際は、脳から「手を動かす」というシグナルが神経を伝わり、電気信号となって筋肉に到達し筋⾁の収縮によって手が動きますが、その動作の差異によって電気信号の波形や活動する筋肉が異なります。
MELTINのコア技術では、波形の違いを見分けることにより、人間が今どういう動きをしているのか/どういう動きをしたいのかを解析できます。情報量が多く複雑な生体信号を少ない電極数で捉え、高速・高精度に解析できるアルゴリズムを保有しており、高次元な身体の動きに変換(再現)することを可能にしています。
そうした独自の生体信号処理技術とロボット開発を組み合わせることで、MELTINが目指すのは次の3つの領域──「身体の補完」「身体の拡張」「身体の回復」です。
「身体の補完という点では、事故で右手を失ってしまった方がMELTINの開発したロボットハンドを装着し、ロボットハンドがその方の生体信号を感知し『ものを握りたい』や『手首を返したい』などを見分けて制御することで、あたかも右手があるかのようにさまざまな作業に取り組むことが期待できます。
身体の拡張では、ロボットハンドとして3本⽬の⼿を装着し、自身の生体信号を用いて3本の手が必要になるような複雑な作業に取り組むことも可能になります。そして、身体の回復では、たとえば事故で脊髄損傷になり下半身がまったく動かない方の下半身に対して生体信号を書き込むと、動かない身体を再び活性化できます。こうした補完・拡張・回復によって、いままで⼈間にはできなかったような新たな可能性が開かれると考えています」(メルティンMMI 代表 粕谷昌宏氏)
手指麻痺の方が「使える⼿指」を取り戻すために
当社とMELTINが開発しているロボットリハビリ機器は、運動機能障害にアプローチするためのものです。運動機能障害の主要な原因疾患である脳⾎管障害の国内患者数は約120万⼈※1、⽶国では720万⼈※2、中国では1,300万⼈と報告※3されています。脳⾎管障害は、国内の寝たきりの原因の第1位、介護要因の第2位となっており、社会的にも大きな課題となっています。
運動機能障害のなかでも「⼿指⿇痺」が⽣じている患者さんは多く、⽇常⽣活の中で実際に使えるレベルまで回復できる割合は、下肢⿇痺と⽐べて低く※4、発症後1か月で握力改善がない場合は機能的予後不良であり※5、早期に⼿指伸展が見られない患者さんには有効な医療法がないのが現状です。
そのため、早期の⼿指運動の機能回復が⾒込めない患者さんでは、⿇痺⼿の回復を待たずに利⼿交換などの代償的リハビリテーションに重点が置かれ、⿇痺⼿のリハビリテーションが⼗分に⾏われないままとなることも少なくありません。
⼀⽅、昨今の神経科学研究から、早期から適切にリハビリテーションを⾏えば、傷害脳でも可塑性変化により運動機能改善が得られることがわかってきました。そのため、発症後早期にリハビリテーションを開始し、頻度、量を増加させるだけではなく、脳神経系組織の可塑性を応⽤して脳神経ネットワークの再構築を⽬指す「ニューロリハビリテーション」を実施し、運動機能改善を得られる⼿法の登場が期待されています。
実際に、作業療法士などが麻痺で動かなくなった患者さんの手足を反復的に動かし、機能回復を促進する療法も行われていますが、重症な患者さんの場合は適切に意図した運動を起こせているかがわからず、有効な治療が行えているかが不明となっています。
ロボットニューロリハビリ機器の4つの特徴
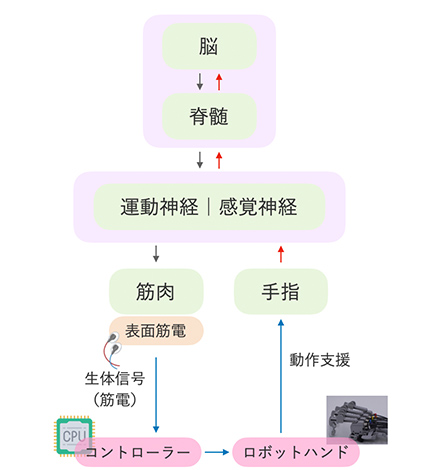
開発中の「手指麻痺用ロボットニューロリハビリテーション機器」は、前腕部分に貼ったパッチ型電極から検出した筋電信号を人工知能(AI)によって解析し、患者さんが手指を動かそうとする意思を読み取り、手の甲側に装着したハンドユニットをワイヤーを通じて駆動させます。
手指が動きにくい患者さんでも、「手指を開きたい」と考え動かそうとするとロボットが手指を開き、「指を曲げたい」と考え動かそうとするとロボットが手指を握り込ませたりすることで、患者さんが自分の意思で自由に手指の動きを練習できることを目指しています。
整体信号に応じて機器が駆動し、患者さんの身体を動かす
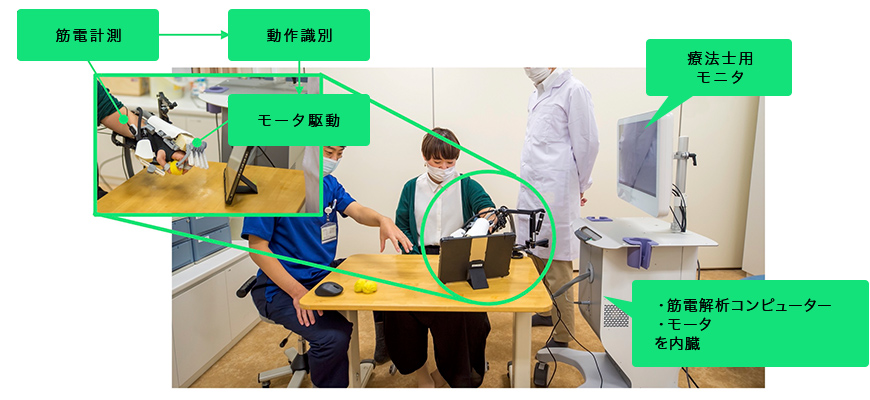
装置の⼤部分は、上記の写真の右にあるカート型の筐体に収められており、⽣体信号を解析するコンピューターや、実際に⼿指を駆動するモーターも格納されています。
この装置には次の4つの特徴があります。
- 1.ワイヤー駆動で⼒強く指を牽引
- 手指麻痺の方は痙縮を伴っていることがあり、強く握り込んでしまっている手指を開くためには大きな力が必要になります。手指近くにモーターを置くと、ハンドユニットの装着部分が大きく、重くなってしまいます。逆に軽量化すると出力が不足しがちになります。そこで本装置では、モーターで直接ハンドユニットを稼働させるのではなく、モーターからワイヤーを介してハンドユニットを駆動させることで、繊細かつパワフルなアシストを確保しながら装着部位を⾮常に軽量でコンパクトにすることができました。この構造により軽量で5本の指それぞれの動きをサポートすることが可能になりました。
- 2.微弱な⽣体信号(表⾯筋電)でも運動意図を識別
- 脳卒中後の麻痺を呈している患者さんは生体信号が微弱なため、検出が難しいことがよくあります。たとえ微弱な生体信号でも、その信号を増幅する技術を用いてアルゴリズムで解析することで、麻痺手の患者さんにおいても運動意図の識別を可能にしようとしています。
- 3.⽣体信号の「波形」で動きを識別するアルゴリズム
- 従来の生体信号を用いたアルゴリズムでは、筋電信号の強弱によって動きを推定しているものがほとんどでした。信号が強ければ動かし、弱ければ動かさないという原理は、腕や足などでは十分でも、指のように多数の筋肉が関与し複雑な動きをする部位では、動作を識別できません。そこで、生体信号の波形自体の差異によって動きを識別するアルゴリズムを開発し、例えば、じゃんけんのチョキとパーのどちらを出そうとしているかの判別を可能にしました。この新しい技術では筋電信号の強弱だけでは運動意図の識別が難しい痙縮がある⽅にも対応できると期待しています。
- 4.作業療法中も装着可能なロボット部
- 開発中の機器は、手の甲側に装置を装着するため、手のひら側が自由に使えます。そのため利用者がいろいろな物を掴んだり離したりできます。また、5本指の独立制御が可能なため、さまざまな大きさや形の物を把持できます。これにより装置を装着したまま作業療法で日常生活に必要な作業を練習可能になります。
以上のように、当社とMELTINは、リハビリテーションの臨床において、⿇痺⼿指でも筋電を検出して可視化し、微弱な筋電から運動意図を⾼精度で識別。タイムラグなく運動を補助でき、使いやすい⼿指⿇痺⽤のロボットニューロリハビリテーション機器の提供を⽬指して開発を進めています。
医療向けの機器として開発を続け、できるだけ早く医療現場にお届けできるように両社ともに力を合わせて進めて参ります。また、実臨床でエビデンスを収集し、⼩型化するなどの工夫も加え、在宅リハビリテーションや遠隔医療での展開、海外展開なども含めてマーケットを拡⼤していくことを視野に入れています。
大日本住友製薬フロンティア事業推進室では、自社がもつ精神・神経疾患領域における医薬品の研究開発で培った知⾒と、ビジネスパートナーの独自技術や知見をかけ合わせることで、新しい価値を生み出す研究や事業開発に取り組んでいます。新たなコラボレーションパートナー企業を広く求めています。パートナーとしてコラボレーションの可能性を検討いただけそうな方は、ぜひお問い合わせください。
<出典情報>
- ※1http://www.seikatsusyukanbyo.com/statistics/disease/cerebral-hemorrhage/(⽇本⽣活習慣病予防協会WebSite)
- ※2Circulation 2017; 135:e146–603(AHA報告)
- ※3http://j.people.com.cn/n3/2020/0930/c94475-9766118.html(⼈⺠網⽇本語版/中国⼼⾎管疾患健康・疾病報告2019)
- ※4Heller A, et.al., Arm function after stroke: measurement and recovery over the first three months. J Neurol Neurosurg Psychiatry. 1987; 50: 714–719
- ※5Alan Sunderland 1989 Arm function after stroke. An evaluation of grip strength as a measure of recovery and a prognostic indicator.
お問い合わせ
-
お問い合わせフォーム
-
日本(東京)
〒103-6012
東京都中央区日本橋2-7-1
東京日本橋タワー
総合受付:7階
住友ファーマ株式会社
フロンティア事業推進室 -
米国(ケンブリッジ)
Sumitomo Pharma America, Inc.
フロンティア事業